# Plotten von Motordaten
Um interessante Korrelationen hervorzuheben. So kann man Gyro-Werte, Grad-Zahlen von Motoren, Geschwindigkeiten von Motoren oder Messwerte der Lichtsensoren graphisch anzeigen.
# Wie funktioniert der Plot?
Es geht darum, wie man es einrichten kann, Daten auf einem Plot anzuzeigen. Um gesetzt wurde das ganze erstmal über [Matplotlib](https://matplotlib.org/) und Tigerente.
```python
import numpy as np
import matplotlib.pyplot as plt
import os
import time
plt.style.use('dark_background') #am wichtigsten ;)
fig, ax = plt.subplots()
ts, dt = [], []
with open('C://Users//Finn//.config//tigerente//info.log', 'r') as f: #öffnen der .log Datei
while f.readline() != "": ... #alten Linien "überlesen"
while True:
last_line = f.readline() #neue Linie einlesen
print(last_line.strip()) #nur der Wert; muss angepasst werden, je nach dem, wie man die Daten schickt
if last_line[:11] == "INFO:root:>": #nach dem > kommen die Daten
print(dt)
dt.append(int(last_line[11:].strip())) #nur der Wert; muss angepasst werden, je nach dem, wie man die Daten schickt
ts.append(time.time()) #timestamp für die x-Achse
if len(dt)>10*5: #alten Werte werden wieder gelöscht
dt.pop(0)
ts.pop(0)
ax.clear()
ax.set_ylim(-100, 100) #je nach dem Was man sich anzeigen will, kann man das hier ändern
ax.plot(ts, dt) #Einstellen der Werte
plt.pause(0.05) #Anzeigen der Werte
plt.show()
```
Auf der Seite des Spikes braucht man nur:
```python
print(">", , sep="")
```
Und natürlich die Verbindung via Tigerente
# Auslesen des Motorspiels
Der Motor hat ein gewisses Spiel, dieses kann man aber auslesen.[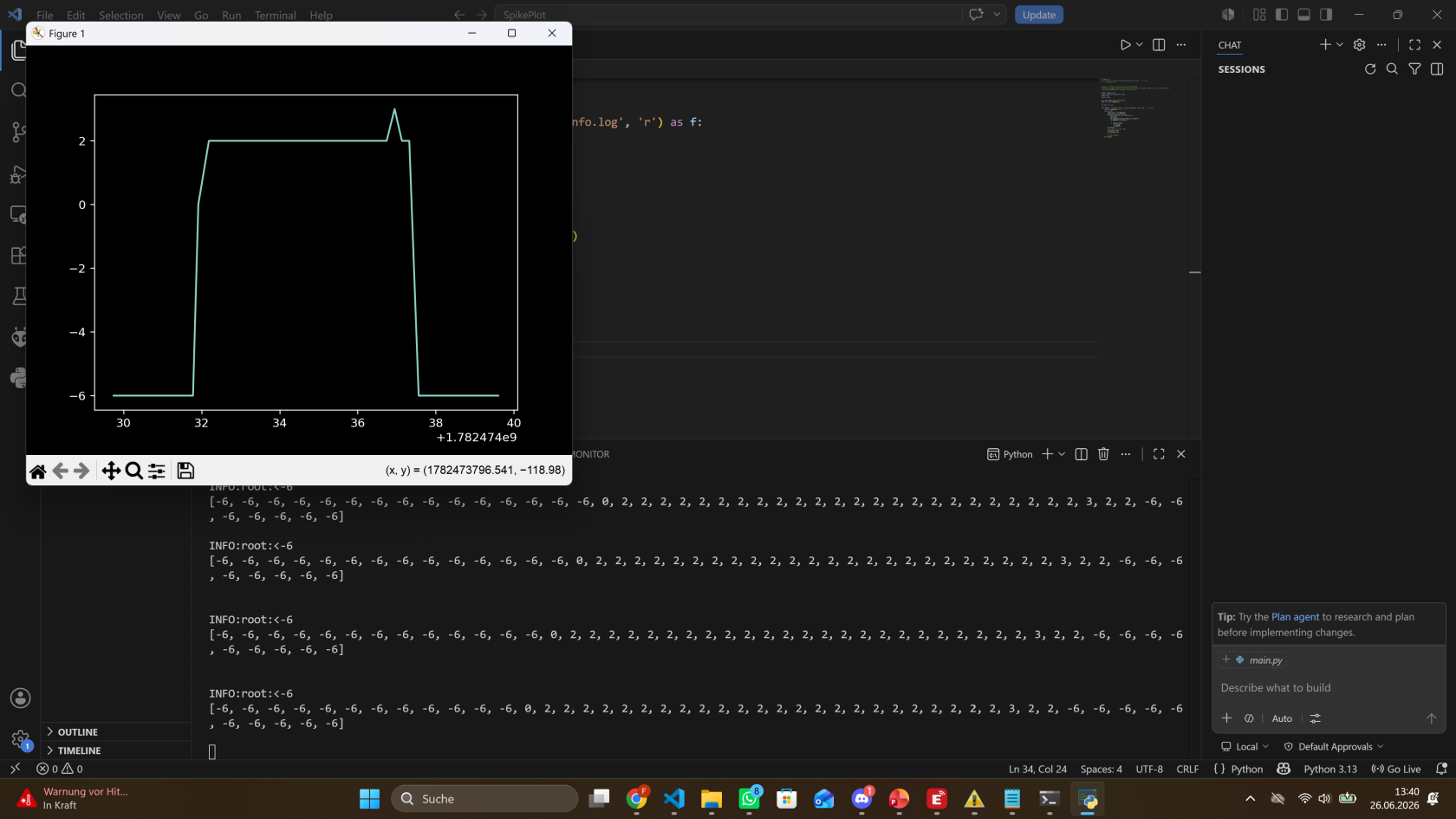](https://bookstack.gsg-robots.de/uploads/images/gallery/2026-06/screenshot-2026-06-26-134047.png)
Man sieht also, dass der Motor ein Spiel von circa 8° hat.
# Plotten von Geschwindigkeitsänderungen
Hierbei geht es darum, die Geschwindigkeit von Motoren auszulesen und Veränderungen z.B. bei Blockaden zu erkennen.
```python
import hub
import motor
import device
import time
async def loop():
motor.run(hub.port.A, 1000) #Geschwindigkeit des Motors auf 1000 stellen
while not hub.button.pressed(hub.button.POWER):
print(">", device.data(hub.port.A)[0], sep="") #Übertragung der Geschwindigkeit
time.sleep(0.2) #Damit es möglichst live, ist. Wenn zu niedrig kommt die BT-Übertragung nicht hinterher
while hub.button.pressed(hub.button.POWER):
...
```
Das ist ein einfach Aufbau, der die Geschwindigkeit des Motors ausließt. Die gemessene Geschwindigkeit ist immer 1/10 so groß, wie die eingestellte.